
Статьи rFactor 2
rFactor2: Настройка FFB на примере «Fanatec CSL Elite»
Настройки фидбэка в rFactor 2
ВНИМАНИЕ: Все помощники в игре должны быть отключены!
Controller.JSON - файл настроек игрового контроллера в rFactor2.
Памятка:
Любые поточные изменения в разделе интерфейса CONTROLS сохраняются в файле Controller.JSON по пути:
Сохранение через Save в общем хранилище профайлов - это просто бэкап, "снимок" с текущих настроек, не более:
На данный момент в rF2 полноценная поддержка руля «Fanatec CSL Elite» отсутствует, поэтому можно загрузить профиль «ClubSport Wheel» в качестве исходного. По завершении настроек, его можно сохранить с подходящим названием. Учтите, как только вы что-то перенастроите в разделе CONTROLS (хоть мультипликатор авто), настройки тут же зальются в Controller.JSON, а не сохранённый профайл. Важно не перепутать файлы, если вносите правки в текстовое содержимое, и помнить, что правильное место для экспериментов и изменений - именно Controller.JSON. Изменяя параметры, не забывайте сохранять файл и как минимум - выходить из сессии (как максимум - из игры). Клавиша Feedback Reset также бывает полезна.
В конце каждой второй строчки с описанием изменяемого параметра, удобно добавлять запись со значением по умолчанию, например, так: [Default=XX]. Во-первых, с помощью поиска по слову «Default» вы легко сможете определять, какие параметры меняли, а во-вторых - не забудете, каким было значение до изменения. Это очень удобно.
Любые поточные изменения в разделе интерфейса CONTROLS сохраняются в файле Controller.JSON по пути:
...\rFactor2\UserData\playerСохранение через Save в общем хранилище профайлов - это просто бэкап, "снимок" с текущих настроек, не более:
...\rFactor2\UserData\ControllerНа данный момент в rF2 полноценная поддержка руля «Fanatec CSL Elite» отсутствует, поэтому можно загрузить профиль «ClubSport Wheel» в качестве исходного. По завершении настроек, его можно сохранить с подходящим названием. Учтите, как только вы что-то перенастроите в разделе CONTROLS (хоть мультипликатор авто), настройки тут же зальются в Controller.JSON, а не сохранённый профайл. Важно не перепутать файлы, если вносите правки в текстовое содержимое, и помнить, что правильное место для экспериментов и изменений - именно Controller.JSON. Изменяя параметры, не забывайте сохранять файл и как минимум - выходить из сессии (как максимум - из игры). Клавиша Feedback Reset также бывает полезна.
В конце каждой второй строчки с описанием изменяемого параметра, удобно добавлять запись со значением по умолчанию, например, так: [Default=XX]. Во-первых, с помощью поиска по слову «Default» вы легко сможете определять, какие параметры меняли, а во-вторых - не забудете, каким было значение до изменения. Это очень удобно.
Steering torque zero-speed mult = 0.45
"Steering torque zero-speed mult":0.45,"Steering torque zero-speed mult#":"Multiplier at zero speed to reduce unwanted oscillation from strong static aligning torque [Default=0.45]",Суммарное усилие, которое передаётся на руль при нулевой скорости. Имитирует воздействие сил трения шин колёс с дорогой без их вращения, плюс небольшого трения в механизмах рулевого привода. Пока машина стоит на месте, мы прикладываем наибольшее усилие, чтобы провернуть рулевое колесо. Как только автомобиль трогается с места и колёса начинают вращаться, руль ощущается намного легче. Попробуйте проделать то же самое в игре. Перед тем, как начать движение, поверните руль на 45°, затем медленно трогайтесь с места. Вы должны чётко прочувствовать перепад усилий на руле - руль моментально разгрузится, управление станет легче.
Настройку лучше начинать с этого параметра, и им же можно её закончить. Это значит, что сначала значение необходимо намеренно занизить, где-то до ~0.35 или ещё ниже. Эта настройка добавляет нам реалистичности лишь в непродолжительные моменты выбора направления, пока авто стоит на месте. Дело в том, что он вызывает преждевременную осцилляцию при подборе других параметров, поэтому временно оставим его ниже средних значений. Тогда он не будет мешать подбору минимальной границы мёртвой зоны и максимально допустимого мультипликатора авто.
После того, как все остальные параметры настроены, усилие на руле при нулевой скорости можно снова поднимать, вплоть до наступления осцилляции. Чем выше окажется Steering torque zerospeed mult, тем реалистичнее. При значении по умолчанию 0.45, перепад усилий на «CSL Elite» ощущается вполне отчётливо.
Не стоит забывать, что наличие усилителя в конструкции автомобиля значительно разгружает руль, а степень воздействия эффекта будет зависеть от характеристик усилителя (его эффективности) для конкретного автомобиля. Фактически, присутствие усилителя будет означать уменьшение влияния Steering torque zerospeed mult во время стоянки (статика), а также крутящего момента сопротивления руля во время езды (динамика).
Steering torque minimum = 0.01 (1%)
"Steering torque minimum":0.01,"Steering torque minimum#":"Minimum torque to apply in either direction to overcome steering wheel's 'FFB deadzone' caused by friction [Default=0.005, 0.5%]",Минимальный крутящий момент. Самое минимальное усилие, достаточное для преодоления мертвой зоны FFB на рулевом колесе, вызванной трением (и др. особенностями конструкции), и которое оно способно воспроизвести. Часто упрощённо именуется как «мёртвая зона» (Deadzone).
На самом деле, следует отличать два нулевых состояния: первое - относится к симулятору (состояние покоя в игре, никакого сигнала не поступает) и второе - относится к игровому манипулятору (такой минимальный сигнал, выше которого мотор FFB уже начинает реагировать). Нам интересно именно на последнее. Дело в том, что эти два нуля - не одно и то же, и существуют они сами по себе до тех пор, пока мы не привяжем их друг к другу, совместив общее начало координат. Эта процедура, собственно, и называется "калибровкой".
Представим идеальный случай, когда оба нуля совпадают: в игре ничего не происходит, в состоянии покоя руль не движется, а при малейших изменениях сигнала FFB вы сразу чувствуете обратную реакцию. Но в реальной жизни всё не так гладко: игра уже посылает сигнал о событиях, а руль даже не думает отзываться. Из-за этого, в остальном диапазоне сигнал отрабатывает слишком вяло, не воспроизводит нюансы, а только лишь общие черты. Это значит, что часть посылаемых игрой сигналов слишком слаба, чтобы руль мог их воспроизвести. В таких случаях говорят, что "руль не информативный" или "слишком слабая чувствительность".
К счастью, эта ситуация исправима, и тут к нам на помощь и приходит калибровочный коэффициент - Steering torque minimum. Определить его значение можно как с помощью FCM, так и WheelCheck, который справляется с этой задачей более информативно (для rF2). Графики 4-х тестов «Step Log 2 (linear force test)», о которых упоминалось выше, показывают как линейность фидбэка, так и диапазон мёртвой зоны. В начале теста программа посылает на руль серию нарастающих сигналов, начиная с самых слабых, и пытается определить минимально достаточный для того, чтобы руль ожил. На графике будет ясно видно, где кривая начинает отрываться от горизонтальной оси и сколько процентов FFB попадает в мёртвую зону (все нулевые значения). Для быстрого выяснения только минимального крутящего момента при тех или иных параметрах, можно воспользоваться тестом «Min Force». Эту цифру надо бережно перенести в rF2, а именно, присвоить параметру Steering torque minimum.
Некоторое повышение глобального уровня фидбэка для слабых рулей может положительно отразиться на минимально требуемом усилии, сдвигая его порог в меньшую сторону, тем самым уменьшая мёртвую зону и расширяя силовые характеристики руля. Однако, при этом немного страдает линейность. Для мощных рулей уменьшение слишком сильного глобального фидбэка (FF) может привести к появлению небольшой мёртвой зоны с одновременным заметным улучшением линейности.
Примечание:
Не нужно путать этот параметр с понятием "мёртвая зона руля" или же "люфт рулевой колонки" в реальных автомобилях, при котором рулевое колесо совершает небольшой свободный ход без эффективного воздействия НА поворот колёс. Люфт имеет чисто МЕХАНИЧЕСКУЮ природу сопряжённых элементов рулевого привода, от него избавляются регулировками. В FFB - ситуация обратная: мы ожидаем получить на руле малейшие воздействия СИЛОВОГО характера ОТ колёс, причём не только от их поворота, а сразу от всех сил, которые на них воздействуют, да ещё, с учётом характера и динамики этих сил. Поэтому эти понятия совершенно разные.
Не нужно путать этот параметр с понятием "мёртвая зона руля" или же "люфт рулевой колонки" в реальных автомобилях, при котором рулевое колесо совершает небольшой свободный ход без эффективного воздействия НА поворот колёс. Люфт имеет чисто МЕХАНИЧЕСКУЮ природу сопряжённых элементов рулевого привода, от него избавляются регулировками. В FFB - ситуация обратная: мы ожидаем получить на руле малейшие воздействия СИЛОВОГО характера ОТ колёс, причём не только от их поворота, а сразу от всех сил, которые на них воздействуют, да ещё, с учётом характера и динамики этих сил. Поэтому эти понятия совершенно разные.
Steering torque sensitivity = 1.5
"Steering torque sensitivity":1.5,"Steering torque sensitivity#":"Sensitivity curve applied to representable torques: 0.0=low 1.0=linear 2.0=high [Default=1]",Чувствительность крутящего момента. Замечательная опция, которая почему-то обычно остаётся без должного внимания при настройке рулей в rF2, и очень зря. Как показала практика, увеличение данного параметра положительно сказывается на любых типах рулей и значительно улучшает информативность FFB. C той лишь разницей, что для рулей послабее значение выставляется немного больше (например, для Logitech G25: 1.5...1.88). Сигналы, поступающие из игры на устройство, становятся более выразительными, более контрастными - проявляются сигналы, которые раньше не обладали достаточной силой, чтобы их можно было различить. С большой вероятностью, можно логично предположить, что увеличение параметра также вносит свою лепту в сужение мёртвой зоны усилий руля, приподнимая график усилий FFB в околонулевой зоне, что, само по себе улучшает чувствительность.
Игра интерпретирует этот параметр, как указание на характер кривой усилий обратной связи, воспроизводимых на руле. Другие твики (усиление FFB, улучшение линейности, ликвидация мёртвой зоны) могут отклонить всю кривую целиком. Как правило, исходная кривая немного задирается вверх, особенно, когда FFB повышается глобально сверх стандартных значений (например, до 106% для G25). Данная настройка подсказывает игре, что кривая у нас >1, т.е. "высокая" (High) и насколько (например, 1.5). Само значение просто подбирается до комфортного, но с пониманием того, что происходит на графике (какая кривая: высокая или низкая). Фигурально, игра будет знать, как корректировать отклонившуюся кривую, чтобы "положить" её обратно на идеальную. В данном случае интересна не столько сама линейность, сколько впечатляющее влияние на детализацию фидбэка.
Можно с некоторой натяжкой сказать, что этот параметр чем-то похож на один из корректирующих коэффициентов линейности FFB из pCARS, но достоверно исследовать его влияние невозможно, т.к. в rFactor2 инструменты для анализа и коррекции линейности алгоритма обратной связи пока отсутствуют. Таким образом, Steering torque sensitivity становится вторым по счёту параметром (кроме Steering torque minimum), которым мы можем откорректировать линейность обратной связи руля, пускай, только на уровне субъективных ощущений.
Steering torque filter = 2 (FFB SMOOTHING)
"Steering torque filter":2,"Steering torque filter#":"Number of old samples to use to filter torque from vehicle's steering column (0-32, note that higher values increase effective latency) [Default=4]",FFB SMOOTHING в меню OPTIONS - сглаживание отдачи FFB (пиков сигналов обратной связи), который фильтрует все силы, включая эффекты демпфирования, трения, инерции и пр. Значение "0" соответствует максимальной детализации, без сглаживания. При точных настройках остальных параметров фидбэка, чувствительность может оказаться слишком заостренной при воспроизведении некоторых эффектов, поэтому для придания реалистичности, острые микропики сигналов обратной связи сглаживают (выравнивают). Чем больше значение, тем плавнее "сейсмограмма" фидбэка. Если значение слишком велико, чрезмерное сглаживание может привести к потере детализации FFB, а также возрастёт задержка (Input Lag) из-за обработки большого количества семплов.
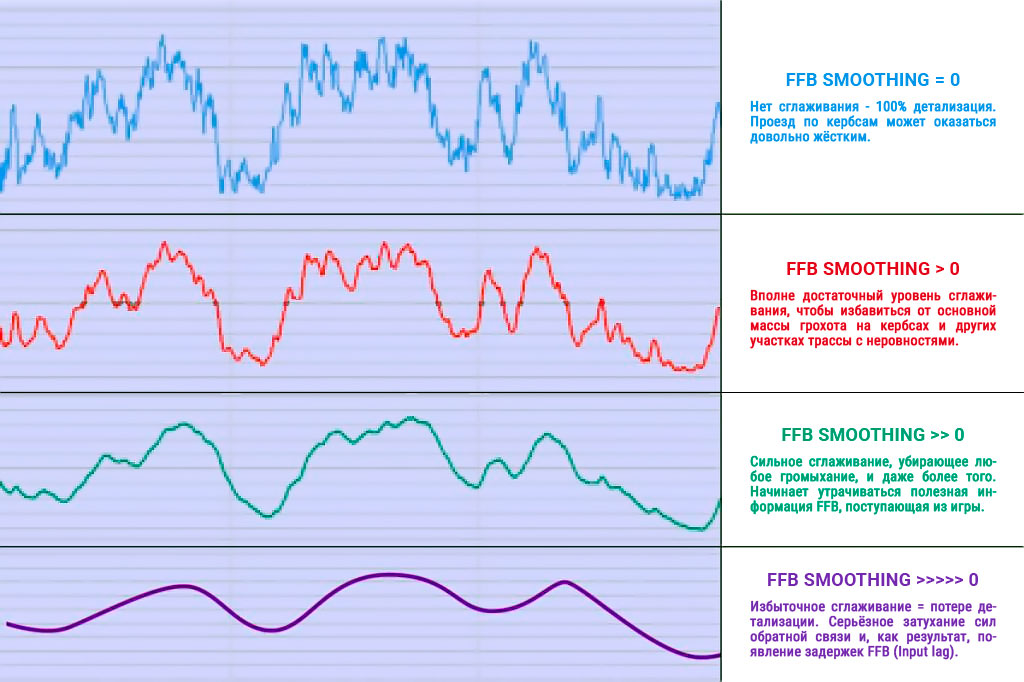
FFB SMOOTHING. «Сейсмограмма» FFB, в зависимости от степени сглаживания.
Если руль слишком гремит и остро ощущается на кербсах - ставим "1" или "2". Теперь шина при проезде по кербсам будет похожа на резину, а не деревянный обод.
Продемонстрирую ещё один пример, как работает сглаживание. Мотор FFB может воспроизводить небольшую "фоновую" вибрацию там, где её быть не должно - на абсолютно ровных участках некоторых трасс, в которые заложен ненулевой (или завышенный) параметр FFB по площади полотна (то ли по недосмотру, то ли по такой задумке автора). Например, на трассе «Road America 2016 v1.0» (by Bela Valko/BetOn) автор, вероятно, пытался передать езду по грубой бетонке, но эффект получился не очень реалистичным: мотор базы подключает фоновую вибрацию на постоянной основе, которая не слишком похожа на реальность. Увеличение "Steering torque filter" с "1" до "2" может устранить такой эффект (по сути, сгладить). Если значение "2" хорошо себя проявит и в других случаях, его можно оставить на постоянной основе.
На разных трассах, машинах, жёсткости подвески, степень воздействия эффекта может отличаться. Больше "1...2" для руля «CSL Elite» смысла ставить нет, т.к. данные могут смазываться, лучше менять другие параметры. На более слабых рулях сглаживание лучше держать пониже. И всётаки, чтобы вас не смущали резкие звуки демпфирования базы, попробуйте поездить в наушниках, возможно эффекты на руле вас вполне устроят!
Остальные параметры, которые будут рассматриваться ниже, уже не способны трансформировать график ввода/вывода сигналов FFB на глобальном уровне, они лишь используют его для применения в частных случаях.
Off-road multiplier = 1
"Off-road multiplier":1,"Off-road multiplier#":"Temporary test variable to reduce force feedback strength off-road (0.0 = zero FFB, 1.0 = full FFB) [Default = 0.3]",Мультипликатор эффектов при движении вне трассы. В Off-road multiplier и так заложена сильная разница в сцеплении, по сравнению с асфальтом. А это значит, если правые или левые колёса съезжают с асфальта и одной стороной попадают на поверхность с другим коэффициентом сцепления (при заезде на гравий, траву, наносную пыль/грязь у края дороги, воду, лёд или любое другое отличное от асфальта покрытие), то вероятность заноса резко возрастает.
Максимальное значение Off-road multiplier не меняет этот принцип, а просто усиливает эффект движения по кочкам и, может быть, добавляет почти условную малость сцепления с поверхностью. Чисто субъективное впечатление: максимальное значение "1" ощущается более реалистично.
Jolt magnitude = 2
"Jolt magnitude":2,"Jolt magnitude#":"How strong jolts from other cars (or walls) are. Suggested Range: -2.0 to 2.0.[Default = 1.5]",Магнитуда столкновений. Насколько сильно будут ощущаться толчки от других авто или столкновения со стенами и другими препятствиями. Максимальное значение ощущается более реалистично.
Rumble strip magnitude = 0.05
"Rumble strip magnitude":0.05,"Rumble strip magnitude#":"How strong the canned rumble strip rumble is. Range 0.0 to 1.0, 0.0 disables effect. [Default = 0]",Величина, характеризующая общую энергию упругих колебаний, вызывающих повороты руля вправо-влево при проезде по предохранительной полосе или же брусчатке. Большие значения вызывают неправдоподобно сильное раскачивание руля с большой амплитудой, а небольшие - более схожи с вибрацией. Последний случай - как раз то, чего необходимо добиться. Движение по предохранительной полосе с диагональной насечкой, либо по поверхности, напоминающей брусчатку, вызывает микроповороты колёс вправо-влево, соответственным образом передающихся на руль в виде вибраций (микровращений) на рулевом колесе. Чтобы прочувствовать максимум воздействия такого алгоритма, временно установите значение "1" и протестируйте его на трассе «Nordschleife Nurburgring LASER SCAN (Filtered) v1.0» (by Nuno Lourenco). Прямо у выезда из пита, на брусчатке, можно быстро протестировать, как именно действует данный параметр. Естественно, воздействие необходимо уменьшить до едва ощутимого эффекта мелкой вибрации, без каких-либо особо выделяющихся поворотов руля. Так, чтобы нельзя было сказать, что данная вибрация совершается поочерёдными движениями "вправо-влево", а просто - "вибрация".
Rumble strip pull factor = 1.5
"Rumble strip pull factor":1.5,"Rumble strip pull factor#":"How strongly wheel pulls right/left when running over a rumble strip. Range: -1.5 to 1.5. [Default = 1.5]",Сила рывка/удара при наезде на высокий поребрик. Насколько сильно управляемые колёса отклоняются вправо/влево во время удара о край высокого бордюра при наезде на него. На самом деле, направление вектора отклонения зависит от угла наезда колеса на препятствие, однако в rF2 мы можем выбрать лишь одно из двух возможных направлений на постоянной основе (либо только вправо, либо только влево), которым соответствует либо позитивное, либо негативное значение параметра. Чем больше значение (позитивное или негативное), тем сильнее и резче рывок.
Rumble strip update thresh = 0.025
"Rumble strip update thresh":0.025,"Rumble strip update thresh#":"Amount of change required to update rumble strip effect (0.0 - 1.0) [Default = 0.05]",Порог обновления эффекта при езде по кербсам. Величина изменения (разницы положений) вертикального хода колеса, при достижении которой эффект обновляется. Если разница не достигает порогового значения, сигнал эффекта не обновляется и ожидает входа следующего сигнала. Подбирается экспериментально, до комфортного.
Rumble strip wave type = 1
"Rumble strip wave type":1,"Rumble strip wave type#":"Type of wave to use for vibe: 0=Sine, 1=Square, 2=Triangle, 3=Sawtooth up, 4=Sawtooth down. [Default = 0]",Тип волны (профиля кривой) эффекта проезда по кербсам: 0=Синусоидальный, 1=Квадратный, 2=Треугольный, 3=Зубчатый (выпуклый), 4=Зубчатый (вогнутый). Выбираем, какой больше нравится или ощущается более реалистично.
Steering torque per-vehicle mult
"Steering torque per-vehicle mult":1,"Steering torque per-vehicle mult#":"Per-vehicle steering column torque multiplier (this is a copy of the .CCH value)",Мультипликатор крутящего момента FFB рулевого колеса для конкретного автомобиля (по умолчанию = 1). Для каждой машины выставляется индивидуально, уникален для каждого автомобиля и запоминается автоматически.
Для исключения лишних манипуляций с мультипликаторами авто (и лучшей калибровки руля в целом) можно использовать следующий подход. Все остальные параметры FFB (а особенно, глобальный фидбэк), по возможности, подбираются так, чтобы вывести FFB на уровень, при котором Steering torque pervehicle mult = 1 для большинства хорошо смоделированных авто - как по части физики, так и по части FFB. Такими авто можно считать подавляющее количество машин от создателей модов «URD» и «Simtek», считающихся сегодня эталонными (с настройками по умолчанию). В случае «Fanatec CSL Elite», для машин «Simtek» в гараже дополнительно подстраивается Tuning: FFB=45.
При настройке всех остальных (не эталонных) машин, мультипликатор подвигается в большую сторону, насколько это возможно, ДО появления клиппинга в реальных заездах. Осцилляция при стоянке (тем более) не допускается.
| «URD» EnduranceRacingX | |
|---|---|
| EGT v2.0 | = 1 |
| DTM 2013 v1.30 | = 1.04 |
| T5 Touring 2013 v1.30 | = 1.04 |
| «Simtek» GT3 WORLD SERIES v1.10 (кроме BMW GTLM v1.0) | |
| McLaren 650S GT3 | = 1 (Tuning: FFB=50 (Lightest)) |
| Все остальные машины | = 1 (Tuning: FFB=45) |
| «speedster» | |
| Nissan 370z rrS Experimental v0.24 | = 0.5 (Tuning: Very Low FFB, Racing Tires) |
| «Studio-397» | |
| Nissan GT-R GT500 2013 v1.2 * | = 1.40 |
| * - мощная машина с отличным управлением, но звук - ужасен, FFB - как нигде, странный и дёрганый, руль - слишком лёгкий (усилитель?) | |
| Honda NSX-R v1.0 | = 1.30 |
| «32_pixels», overwork by Juergen-BY | |
| Toyota Celica GTO 1987 v2.05.88 | = 0.90 |





Комментарии 4